ステッピングモータードライブICを使用する際の加減速について説明します。
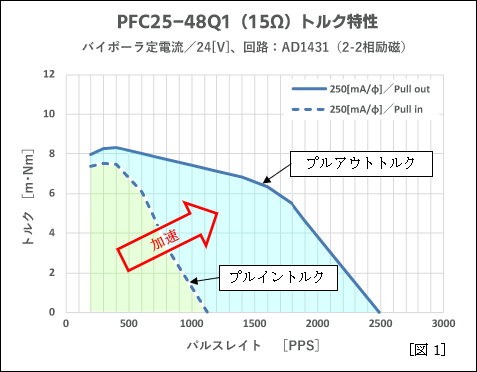
ステッピングモーターを高速で回転させるにはプルアウトトルク領域で使用します。
このプルアウトトルク領域で使用するためにはモーターを加速させる必要があり、その加速と減速について説明します。
1. プルイントルクとプルアウトトルク
当社ホームページの用語集より
プルイントルク
自起動領域内で、所定のパルス周波数で駆動し、負荷に打ち勝って起動出来る最大トルクです。
引き込みトルク、起動トルクとも呼ばれています。
プルアウトトルク
所定のパルス周波数で、スルー領域において同期運転可能な最大トルクです。
プルアウトトルクを超える負荷条件では同期運転ができず脱調と呼ばれる現象を起こします。
脱出トルクとも呼ばれています。
となっています。
これらプルイントルクとプルアウトトルクのイメージをもう少し解りやすく車の動作に例えてみます。
この頃はオートマ車が主流ですがクラッチ付きのマニュアル車をイメージしてみてください。
[プルイントルク]
車を発進させるにはアクセルを踏んでエンジンの回転数を上げてクラッチをつなぎます。
この時に車の荷物が重すぎたり、急発進しようとしたりするとエンストしてしまいます。
ステッピングモーターも同様で、負荷が重すぎたり、早い速度で急に回転させたりすると起動できずに脱調してしまいます。
脱調せずに起動できる回転数とトルクの値をプロットしたのがプルイントルク特性です。
[プルアウトトルク]
次に、車は慣性がありますので一旦動き出したら発進時に要したパワーを速度に回せます。
ただし、加速には速度に合わせた適切なエンジン回転数とシフトアップが必要です。
ステッピングモーターも同様に慣性モーメントがあるため、一旦回転し始めたら起動に要したパワーを回転速度に回すことができます。
こちらも適切な加速が必要です。加速して脱調せずに動作できる回転数とトルクの値をプロットしたのがプルアウトトルク特性です。
と言ったイメージで、
ステッピングモーターを高速で回転させるにはプルイントルク領域で起動し、プルアウトトルク領域まで加速する。と言う動作が必要になります。
2. 加減速の種類
ステッピングモーターの加速には、階段状加減速,直線加減速,S字加減速などがあります。
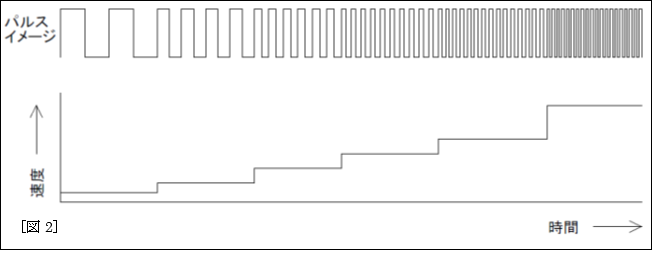
階段状加減速
段階的に速度を変化させる加減速です。マイコンなどでパルスを発生させドライブICを動かす場合、マイコンのリソースを節約するため基準となるパルスを分周して使う場合があります。
例えば1000ppsのパルスを基準とした場合、1/10の100pps,1/5の200pps,1/3の333pps,1/2の500pps,1/1の1000ppsなどを作り、これらを階段状に組み合わせて加減速させます。
ただし、分周比が小さくなると速度差が大きくなり、負荷によっては追従できなくなる場合があります(500pps⇒1000ppsの場合など)。
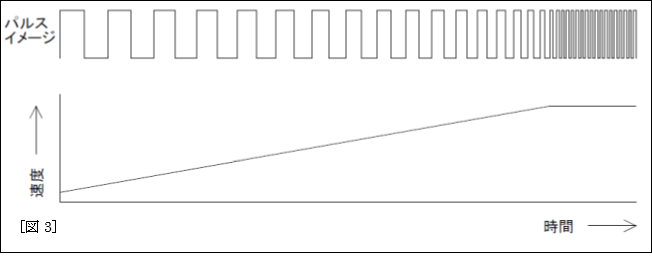
直線加減速
リニアに速度を変化させる加減速です。パルス発生LSI(弊社のPCL,PCDシリーズ等)を使ったり、リソースが充分にあるマイコンなどで作成したりします。
階段状加減速に比べスムースな加減速が可能で、モーターの追従性が良くなる場合があります。
また、パルス発生LSIの場合、スタートと同時に内部で加速を開始しているため、初めのパルス幅が起動速度から計算したパルス幅より狭くなります。
このため確実に起動速度で起動したい場合は、起動速度で数パルス分動作してから加速を開始する、アイドリングパルスと言う機能もあります。
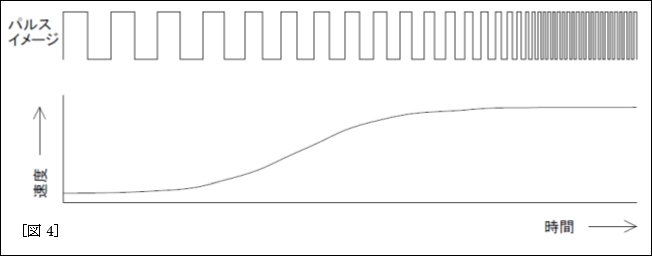
S字加減速
加速開始時と加速終了時の加速度変化を小さくさせる様にパルスを発生させる加減速です。メカの振動を抑え、挙動をスムースにしたい場合などに使用します。パルス発生LSI(弊社のPCL,PCDシリーズ等)を使ったり、リソースが充分にあるマイコンなどで作成したりします。
加減速時の速度カーブには、二次関数,正弦波,サイクロイド曲線などがあります(弊社は二次関数)。
ただし、低作動作時や起動速度と動作速度の差が少なくパルスの速度変化が少ない場合や、加減速に要するパルス数が少ない場合などは、S字加減速の特徴が出ない場合もあります。
3. 乱調周波数の考慮
ステッピングモーターにはモーター固有の共振現象が発生しやすい乱調周波数があります。※1
この乱調周波数帯ではモーターの挙動が不安定になるため、加減速時に乱調周波数の考慮も必要です。
・乱調周波数を避けて使用する
例えば乱調周波数帯が200pps近辺にあって、プルイントルクに余裕が有りもっと高速で起動可能な場合は、乱調周波数帯を避けた周波数(例えば300pps)で起動させます。
・乱調周波数を短時間で抜ける様に加速する
例えば乱調周波数帯が200pps近辺にあって、50ppsから1000ppsまで加速させたい場合は、200ppsの乱調周波数帯を短時間で抜ける様に加速させます。
負荷や使用する動作速度にもよりますが、数10~100msの加減速時間で動作させる場合が多い様です。
4. 実際の物を動かす
主に加速について説明してきましたが、減速時は摩擦がブレーキになり加速より短い時間で停止できる場合もあります。
また、メカの机上計算でプルイントルクとプルアウトトルクを満足したとしても、メカの加工誤差、組み立て誤差などにより上手く動かない場合もありますし、どの様な加減速をしたら良いか迷う場合もります。その様な場合は実験機や試作機を実際に動かしてみるのが早い場合が多々あります。※1
弊社ではドライバーやコントローラの貸し出しもやっておりますので、実際に動かしてみたいなどの機会がありましたら、お気軽にお声がけ下さい。
※1 乱調及び動作検証に関しては弊社HPの「モーター動作検証のススメ」をご参照ください。